1. 一个直三棱柱体,如下图所示,其中\overline{AB}\perp\overline{AC},E是\overline{AC}的中点,F是\overline{A_1B_1}的中点。已知|\overline{AB}| = |\overline{AC}| = 4,|\overline{AA_1}| = 6。求\overline{EF}与\overline{A_1C}的夹角与距离.
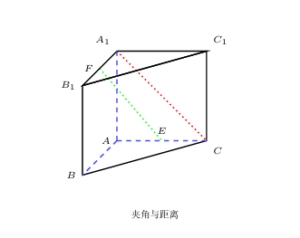
- 以\frac{\overrightarrow{AC}}{|\overrightarrow{AC}|},\frac{\overrightarrow{AA_1}}{|\overrightarrow{AA_1}|},\frac{\overrightarrow{AB}}{|\overrightarrow{AB}|}为标准右手直角坐标系,则\overrightarrow{EF}=(-2,6,2),\overrightarrow{A_1C}=(4,-6,0),\overrightarrow{EA_1}=(-2,6,0),则\operatorname{Arg}(\overline{EF},\overline{A_1C})=\arccos(\frac{|\overrightarrow{EF}\cdot\overrightarrow{A_1C}|}{|\overline{EF}|\cdot|\overline{A_1C}|})=\arccos\frac{|-8-36|}{2\sqrt{11}\cdot2\sqrt{13}}=\arccos\frac{\sqrt{11}}{\sqrt{13}},d(\overline{EF},\overline{A_1C})=\frac{|(\overrightarrow{EA_1},\overrightarrow{EF},\overrightarrow{A_1C})|}{|\overrightarrow{EF}\times\overrightarrow{A_1C}|}=\frac{|-24+48|}{4\sqrt{22}}=\frac{6}{\sqrt{22}}.
2. 一个长方体,如下图所示,已知|\overline{AB}|=3,|\overline{AD}|=4,|\overline{AA_1}|=7,|\overline{BM}|=2。求三角形A_1MC的面积,以及点A到三角形A_1MC的距离.
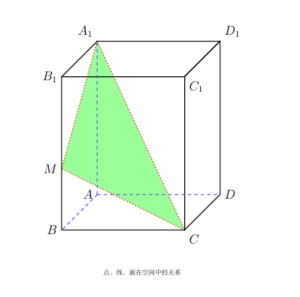
- 以\frac{\overrightarrow{BC}}{|\overrightarrow{BC}|},\frac{\overrightarrow{BA}}{|\overrightarrow{BA}|},\frac{\overrightarrow{BB_1}}{|\overrightarrow{BB_1}|}为标准右手直角坐标系,则\overrightarrow{MC}=(4,0,-2),\overrightarrow{MA_1}=(0,3,5),\overrightarrow{MA}=(0,3,-2),则S_{A_1MC}=\frac{|\overrightarrow{MC}\times\overrightarrow{MA_1}|}{2}=\sqrt{145},d(A,A_1MC)=\frac{|\overrightarrow{MA}\cdot(\overrightarrow{MC}\times\overrightarrow{MA_1})|}{|\overrightarrow{MC}\times\overrightarrow{MA_1}|}=\frac{|-60-24|}{2\sqrt{145}}=\frac{42}{\sqrt{145}}.
3. 讨论轮子上一条固定半径的中点A的运动状态,并求运动轨迹.
- 设圆心O,初始圆心O_0,以\{O;\vec i,\vec j\}为标架,A点在此标架下的参数轨迹为A(\frac{r}{2}\cos\theta,\frac{r}{2}\sin\theta),考虑圆心O有\overrightarrow{O_0O}=(-r\theta,0),所以(x,y)\mapsto(x-r\theta,y)为\{O;\vec i,\vec j\}到\{O_0;\vec i,\vec j\}的变换,在此变换下轨迹变为A(\frac{r}{2}\cos\theta-r\theta,\frac{r}{2}\sin\theta),即为所求.
4. (内摆轮线) 有一个固定的轮子,半径为R. 另有一个半径为r(r<R)的轮子,沿着固定轮子的内边缘纯粹滚动(无滑动)。求小轮子边缘上一个固定点A的运动轨迹.
- 设外轮圆心O(0, 0),内轮圆心P,内轮初始圆心P_0((R-r)\cos\theta_0,(R-r)\sin\theta_0),以\{P;\vec i,\vec j\}为标架,不妨设A点在此标架下的参数轨迹为A(r\cos\theta,r\sin\theta),考虑内轮圆心P有\overrightarrow{OP}=(R-r)\begin{bmatrix}\cos(\theta_0-\frac{r}{R-r}\theta)\\\sin(\theta_0-\frac{r}{R-r}\theta)\end{bmatrix},所以(x,y)\mapsto(x,y)+\overrightarrow{OP}为\{P;\vec i,\vec j\}到\{O;\vec i,\vec j\}的变换,在此变换下轨迹变为A(r\cos\theta+(R-r)\cos(\theta_0-\frac{r}{R-r}\theta),r\sin\theta+(R-r)\sin(\theta_0-\frac{r}{R-r}\theta)),即为所求.
5. (外摆轮线) 有一个固定的轮子,半径为R。另有一个半径为r的轮子,沿着固定轮子的外边缘纯粹滚动(无滑动)。求小轮子边缘上一个固定点A的运动轨迹.
- 设外轮圆心O(0, 0),外轮圆心P,外轮初始圆心P_0((R+r)\cos\theta_0,(R+r)\sin\theta_0),以\{P;\vec i,\vec j\}为标架,不妨设A点在此标架下的参数轨迹为A(r\cos\theta,r\sin\theta),考虑内轮圆心P有\overrightarrow{OP}=(R+r)\begin{bmatrix}\cos(\theta_0+\frac{r}{R+r}\theta)\\\sin(\theta_0+\frac{r}{R+r}\theta)\end{bmatrix},所以(x,y)\mapsto(x,y)+\overrightarrow{OP}为\{P;\vec i,\vec j\}到\{O;\vec i,\vec j\}的变换,在此变换下轨迹变为A(r\cos\omega t+(R+r)\cos(\theta_0+\frac{r}{R+r}\theta),r\sin\omega t+(R+r)\sin(\theta_0+\frac{r}{R+r}\theta)),即为所求.
6. 证明曲线r(t)是球面曲线当且仅当r\cdot r' \equiv0.
- r(t)是球面曲线\Leftrightarrow\exist R\ni |r|^2=R^2\Leftrightarrow(|r|^2)'=2r\cdot r'\equiv0\Leftrightarrowr\cdot r'\equiv 0.
7. 设粒子的运动轨迹为r(t) =\begin{bmatrix}a\cos t\\a\sin t\\bt^2\end{bmatrix},其中ab\neq0. 求粒子的运动速度以及粒子从时刻t=0到t=\pi时刻的运动距离,并求曲率与挠率.
- v=r'=\begin{bmatrix}-a\sin t\\a\cos t\\2bt\end{bmatrix},s=\int_0^\pi |v|\mathrm{d}t=\int_0^\pi\sqrt{a^2+4b^2t^2}\mathrm{d}t=\frac{a^2}{2b}(\frac{\frac{2b}{a}\sqrt{\frac{4b^2}{a^2}+1}+\ln(\sqrt{\frac{4b^2}{a^2}+1}+\frac{2b}{a})}{2})=\frac{\sqrt{a^2+4b^2}}{2}+\frac{a^2}{4b}(\ln(\sqrt{a^2+4b^2}+2b)-\ln a),r''=\begin{bmatrix}-a\cos t\\-a\sin t\\2b\end{bmatrix},r'\times r''=\begin{bmatrix}2ab\cos t+2abt\sin t\\2ab\sin t-2abt\cos t\\a^2\end{bmatrix},|r'\times r''|=a\sqrt{a^2+4b^2(t^2+1)},\mathfrak k=\frac{|r'\times r''|}{|r'|^3}=\frac{a\sqrt{a^2+4b^2(t^2+1)}}{(\sqrt{a^2+4b^2t^2})^3},r'''=\begin{bmatrix}a\sin t\\-a\cos t\\0\end{bmatrix},(r',r'',r''')=2a^2bt,\tau=\frac{(r',r'',r''')}{|r'\times r''|^2}=\frac{2bt}{a^2+4b^2(t^2+1)}.
P. 设有一艘飞船其轨迹为\vec r(t)=(3+t)\vec i+(2+\ln t)\vec j+(7-\frac{4}{t^2+1})\vec k. 设空间站的位置为(6,4,9).
(1) 若船长想要在空间站停泊,他应该在何时关掉引擎?
- \vec r'=\vec i+\frac{1}{t}\vec j+\frac{8t}{(t^2+1)^2}\vec k. ((6,4,9)-\vec r)\times \vec r'=0\Rightarrow(\frac{8t(2-\ln t)}{(t^2+1)^2}-\frac{1}{t}(2+\frac{4}{t^2+1}),\frac{8t(t-3)}{(t^2+1)^2}+2+\frac{4}{t^2+1},\frac{3-t}{t}-2+\ln t)=0\Rightarrow t=1. 所以在t=1时.
(2) 关掉引擎时刻曲线的曲率与挠率.
- \vec r''=-\frac{1}{t^2}\vec j-\frac{32t^2}{(t^2+1)^3}\vec k,\vec r'''=\frac{2}{t^3}\vec j+\frac{192t^3}{(t^2+1)^4},\vec r'(1)=(1,1,2),\vec r''(1)=(0,-1,-4),\vec r'''(1)=(0,2,12),(\vec r'\times \vec r'')(1)=(-2,4,-1),(\vec r',\vec r'',\vec r''')(1)=-4,\mathfrak k=\frac{\sqrt{21}}{6\sqrt6},\tau=-\frac{4}{21}.
(3) 关掉引擎时刻相应的活动标架.
- \vec r(1)=(4,2,5),\mathrm{T}=\frac{1}{\sqrt6}(1,1,2),\mathrm{N}=\frac{1}{\sqrt{14}}(3,1,-2),\mathrm B=\frac{1}{\sqrt{21}}(-2,4,-1),则\{\vec r(1);\mathrm T,\mathrm N,\mathrm B\}即为所求.
8. 设粒子的运动轨迹为r(t) =\begin{bmatrix}a\cos t\\ a\sin t\\bt\end{bmatrix},其中ab\neq0。求粒子轨迹的正交活动标架及相应的Frenet-Serret公式.
- r'=(-a\sin t,a\cos t,b),r''=(-a\cos t,-a\sin t,0),r'''=(a\sin t,-a\cos t,0),r'\times r''=(ab\sin t,-ab\cos t,a^2),(r',r'',r''')=a^2b,\mathrm T=\frac{1}{\sqrt{a^2+b^2}}(-a\sin t,a\cos t,b),\mathrm N=(-\cos t,-\sin t,0),\mathrm B=\frac{1}{\sqrt{a^2+b^2}}(b\sin t,-b\cos t,a),\kappa=\frac{a}{a^2+b^2},\tau=\frac{b}{a^2+b^2},因此\{(r;\mathrm T,\mathrm N,\mathrm B):t\in\R\}与\begin{bmatrix}\mathrm T'\\\mathrm N'\\\mathrm B'\end{bmatrix}=\frac{1}{\sqrt{a^2+b^2}}\begin{bmatrix}0&a&0\\-a&0&b\\0&-b&0\end{bmatrix}\begin{bmatrix}\mathrm T\\\mathrm N\\\mathrm B\end{bmatrix}即为所求.
9. 设曲面S由如下方式给出:\left\{\begin{matrix} x =r\cos\theta \\ y =r\sin\theta \\ z =b\theta\end{matrix}\right. (0\leq r \leq1, 0\leq\theta \leq2\pi, b>0),求曲面在一点处的面积元,及该点处的D_P,M_P,以及该点处的法曲率\mathfrak{k_n}.

- S_r=(\cos\theta,\sin\theta,0),S_\theta=(-r\sin\theta,r\cos\theta,b),S_r\times S_\theta=(b\sin\theta,-b\cos\theta,r),\mathrm{n} =\frac{1}{\sqrt{b^2+r^2}}(b\sin\theta,-b\cos\theta,r),S_{rr}=0,S_{r\theta}=S_{\theta r}=(-\sin\theta,\cos\theta,0),S_{\theta\theta}=(-r\cos\theta,-r\sin\theta,0),因此\mathrm dS=|S_r\times S_\theta|\mathrm dr\mathrm d\theta=\sqrt{b^2+r^2}\mathrm dr\mathrm d\theta,D_P=\mathrm dr^2+(r^2+b^2)\mathrm d\theta^2,M_P=-\frac{2b}{\sqrt{b^2+r^2}}\mathrm dr\mathrm d\theta,\mathfrak{k_n}=\frac{-\frac{2b}{\sqrt{b^2+r^2}}\mathrm dr\mathrm d\theta}{\mathrm dr^2+(r^2+b^2)\mathrm d\theta^2}.
10. 设曲面S满足方程z =x^2+y^2。求曲面在P(1,1,2)处的面积元,以及该点处的法曲率.
- S_x=(1,0,2x),S_y=(0,1,2y),S_x(P)=(1,0,2),S_y(P)=(0,1,2),(S_x\times S_y)(P)=(-2,-2,1),\mathrm{n}=\frac{1}{3}(-2,-2,1),S_{xx}=(0,0,2),S_{xy}=S_{yx}=0,S_{yy}=(0,0,2),D_P(P)=5\mathrm dx^2+8\mathrm dx\mathrm dy+5\mathrm dy^2,M_P(P)=\frac{2}{3}\mathrm dx^2+\frac{2}{3}\mathrm dy^2,因此\mathrm dS|_P=|(S_x\times S_y)(P)|\mathrm dx\mathrm dy=3\mathrm dx\mathrm dy,\mathfrak{k_n}(P)=\frac{\frac{2}{3}\mathrm dx^2+\frac{2}{3}\mathrm dy^2}{5\mathrm dx^2+8\mathrm dx\mathrm dy+5\mathrm dy^2}.
11. 设曲面S满足方程z=x^2−y^2。求曲面在 P(1,1,0)处的面积元,D_P,M_P,以及该点处的法曲率.
- S_x=(1,0,2x),S_y=(0,1,-2y),S_x(P)=(1,0,2),S_y(P)=(0,1,-2),(S_x\times S_y)(P)=(-2,2,1),\mathrm{n}=\frac{1}{3}(-2,2,1),S_{xx}=(0,0,2),S_{xy}=S_{yx}=0,S_{yy}=(0,0,-2),因此\mathrm dS|_P=|(S_x\times S_y)(P)|\mathrm dx\mathrm dy=3\mathrm dx\mathrm dy,D_P(P)=5\mathrm dx^2-8\mathrm dx\mathrm dy+5\mathrm dy^2,M_P(P)=\frac{2}{3}\mathrm dx^2-\frac{2}{3}\mathrm dy^2,\mathfrak{k_n}(P)=\frac{\frac{2}{3}\mathrm dx^2-\frac{2}{3}\mathrm dy^2}{5\mathrm dx^2-8\mathrm dx\mathrm dy+5\mathrm dy^2}.
Comments NOTHING